

Walking Robots – gehende Roboter
Autor: ©Science Pool, River und Carola
Dezember 2020
Unser Bristle-Bot ist ein Mini-Roboter, der sich durch die Vibration seines Motors fortbewegt. Dabei kommt er ganz ohne Räder, Beine oder sonstige Hilfsmittel aus. Gehen ist für uns Menschen so normal, dass uns gar nicht mehr auffällt, was für eine geniale Leistung wir dabei erbringen. Ein Baby lernt erst Sitzen, dann krabbelt es und meist danach lernt es, wie es die Beine bewegen muss, damit es gehen kann. Das dauert auch noch mal eine ziemliche Zeit, zumindest, bis es relativ sicher funktioniert.

Für die Robotik, also das Wissensgebiet der Roboter und ihrer Technik, sind Beine natürlich auch praktischer als Räder, weil sie viel mehr „können“. Aber sie sind auch komplizierter zu bauen, beziehungsweise so zu konstruieren, dass sie ihren Zweck, nämlich das Gehen ohne zu fallen, auch erfüllen. Roboter mit vielen Beinen können stabiler stehen, sind aber nicht so schnell und wendig wie Roboter mit weniger Beinen. Es gibt mittlerweile Roboter, die sich so fortbewegen können, wie ein Mensch, wie ein Hund oder sogar wie ein Käfer.
Einige dieser Roboter und vor allem, warum es für zweibeinige Roboter so schwierig ist zu gehen ohne umzufallen, wollen wir dir hier vorstellen. Wir fangen mit wenigen Beinen an und arbeiten uns dann hoch.
Der einbeinige Roboter
Hast du gedacht, ein Roboter muss mindestens zwei Beine haben? Nein! Es gibt auch Roboter mit nur einem Bein, die dann wie auf einem Sprungstab durch die Gegend hüpfen. Ein Beispiel dafür ist der Roboter SALTO, der von der University of California Berkeley entwickelt wurde. SALTO kann auf seinem kräftigen Bein mehr als dreimal so hoch wie seine Körpergröße springen – und das gleich mehrmals hintereinander.

Bei Robotern, so wie bei anderen Gebieten im Maschinenbau, holt man sich gerne Inspiration aus der Natur. Im Laufe der Evolution haben sich nämlich ziemlich clevere Mechanismen durchgesetzt. Bei SALTO hat man sich das Hüpfen von den Galagos, auch Buschbabys genannt, abgeschaut. Im Gegensatz zu Grashüpfer zum Beispiel, die für jeden Sprung Zeit brauchen, um Kraft zu sammeln, können Buschbabys mehrmals hintereinander hüpfen.
Roboter auf zwei Beinen
Warum aber ist es so schwierig, Roboter zu entwickeln, die auf zwei Beinen gehen können, so wie wir? Bei der Fortbewegung auf zwei Beinen gibt es zwei Herausforderungen: die Dynamik und die Körperspannung. Beim Gehen reagieren wir „dynamisch“ auf Hindernisse. Unsere „Körperteile“ können sich innerhalb ihrer Bewegungsmöglichkeiten ohne Stocken und Ruckeln bewegen. Dadurch kannst du jede Bewegung auf die Anforderungen des Momentes einstellen. Am besten kannst du dir vorstellen, was das heißt, wenn du daran denkst, am Strand entlang zu laufen. Manche Stellen im Sand sind fester, an manchen Stellen sinken unsere Füße tiefer ein. Dabei musst du jede Sekunde deinen Körper und wie du ihn bewegst, anpassen. Und (fast) alle Muskeln deines Bewegungsapparates arbeiten dabei mit, das ist echte Team-Arbeit!

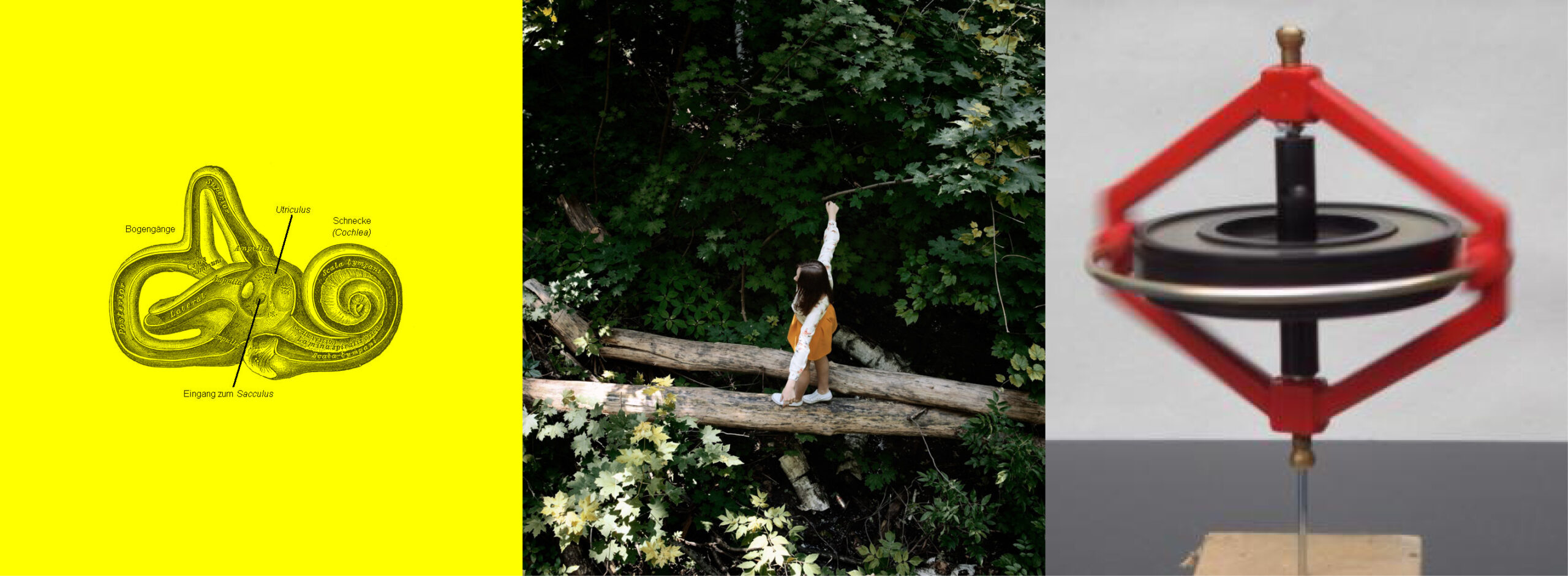
Das Hauptproblem ist das Gleichgewicht. Wir Menschen haben dabei zwei Vorteile. Einerseits haben wir viele Sinne, die Information zum Gleichgewicht liefern. Am Wichtigsten dafür ist das Gleichgewichtsorgan. Im Innenohr haben wir den Vestibularapparat, eine Art Wasserwaage, die uns verrät, wie wir uns bewegen, ob geradlinig oder zum Beispiel mit Drehungen. Zur Kontrolle dessen, was wir spüren, haben wir unsere Augen. Sie zeigen uns, wo wir uns im Raum befinden und wo oben und unten sind. Unser Gehör unterstützt unsere Wahrnehmung, wie schnell wir uns bewegen, wenn wir ein mehr oder weniger starkes Luftrauschen hören. Auch auf der Haut können wir die Bewegungen der Luft spüren. Und einer unserer Sinne, die sogenannte Propriozeption, „sagt“ uns, wo sich die Teile unseres Körpers im Raum befinden.
Andererseits haben wir natürlich auch ein superschlaues Gehirn, das all diese Information in Windeseile auswerten kann und – wenn notwendig – unsere Muskeln beauftragt, korrigierende Bewegungen durchzuführen.
Wenn wir das auf einen Roboter umlegen, wissen wir, dass so ein „Gerät“ also auch beides braucht: Sinne, die ihm Information liefern und einen schnelleen Rechner, der diese Information auswerten kann – und das am besten bevor er umfällt, sonst ist es natürlich schon zu spät! Wir Menschen lernen das am einfachsten durch Übung, also durch Wiederholung. Wir lernen als junge Kinder zu gehen und denken dann, wenn wir es können, gar nicht mehr weiter drüber nach.
Noch wurde kein Roboter mit Innenohr gebaut. Aber wir haben schon andere Lösungen eingesetzt. Gyroskope zum Beispiel, sind Kreiselinstrumente, die sich immer wieder aufrichten, während sie sich drehen. Wenn man die Lage eines solchen Kreisels immer wieder genau beobachtet, weiß man, wie weit und in welche Richtung er gerade kippt und sich dann wiederaufrichten. Das können wir beim Roboterbau einsetzten.
Für die Berechnung und Umsetzung benutzt man unter anderem sogenanntes „Machine Learning“ also maschinelles Lernen. Das ist etwas noch ganz Neues und wirklich Spannendes. Es gibt nämlich schon Computerprogramme, die aus Erfahrung lernen. Man muss dem Roboter also nicht im Vorhinein genau sagen, wie das mit dem Gleichgewicht funktioniert. Er kann es selbst testen und kann seine Versuche in Erfahrung und Lernen umsetzten bzw. umrechnen.
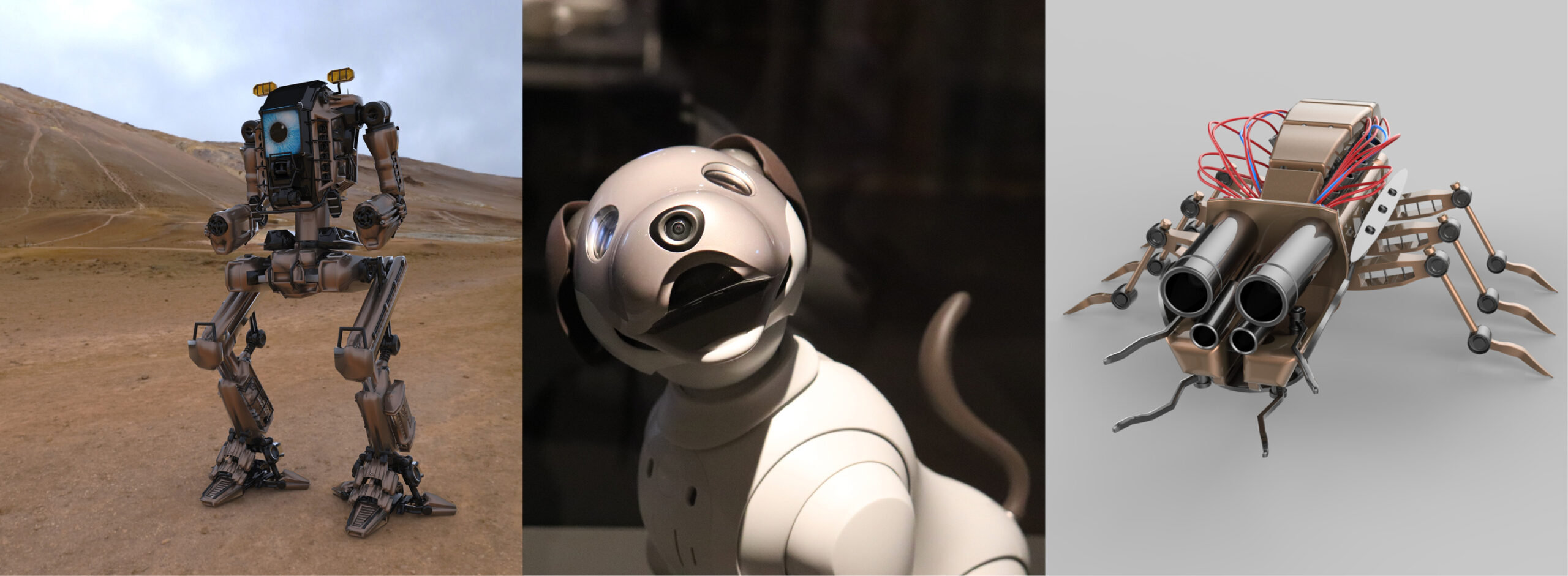
Mittlerweile sind wir beim Bau von zweibeinigen Robotern schon viel besser geworden. Ein Beispiel für einen funktionierenden zweibeinigen Roboter ist ASIMO, den das Unternehmen Honda entwickelt hat.
Roboter auf allen Vieren
Roboter mit vier Beinen sind stabiler als Roboter mit nur zwei Beinen, weil einerseits die vier Beine eine größere Standfläche ermöglichen und andererseits die Roboter dem Boden schon viel näher sein können. Das kannst du auch an dir erkennen, indem du folgendes probierst:
Stell dich mal ganz locker hin und bitte jemandem (vielleicht deine Schwester oder deinen Bruder oder einen Elternteil) dass sie versuchen sollen, dich (vorsichtig!) umzuschubsen. Merke dir dabei, wie einfach oder schwierig das ist. Aber Achtung: Für diesen Selbsttest reicht ein leichter Schubs, vielleicht legst du dir auch zuerst Kissen auf den Boden! Von vorne oder von hinten ist es wahrscheinlich einfacher, dich umzuschubsen, als von den Seiten.
Geh jetzt in den Vierfüßlerstand und versuch mit deinem oder deiner VersuchspartnerIn das Gleiche noch einmal. Diesmal wird es viel schwieriger sein, dich umzuschubsen. Du stehst stabiler und kannst das Schubsen auch viel besser ausgleichen. Ein Beispiel für einen vierbeinigen Roboter ist der Mini Cheetah (Mini-Gepard) der Universität MIT, der sogar Rückwärtssaltos machen kann.
Roboter im Kriech- bzw. Krabbelgang
Roboter mit sechs Beinen sind oft Insekten nachempfunden. Sie können unterschiedliche Gangarten haben. Sie können sich zum Beispiel in Form einer Welle fortbewegen. Das ist eine sehr langsame Gangart, bei der sich die Beine paarweise von hinten nach vorne wie eine Welle bewegen. Auch möglich das sogenannte „Dreibein-Stativ“, bei der sich immer drei Beine gleichzeitig bewegen und die anderen drei Beine den Roboter stabil halten, womit der Roboter schneller unterwegs sein kann, als mit dem Wellengang. Roboter mit acht Beinen ähneln wiederum Spinnentieren. Sie sind maximal stabil, aber nicht so breit einsetzbar, wie die anderen Bots.
Noch sind wir bei der Entwicklung der Roboter am Anfang. Aber wir werden immer geschickter und einfallsreicher, je länger wir in diesem Bereich forschen und konstruieren. Und wer weiß schon, welche Ideen Kids wie du in den nächsten Jahren vielleicht umsetzen!
Bild Vestibularapparat: Von unbekannt, Henry Gray (1821–1865). Anatomy of the Human Body, 1918. Quelle: http://www.bartleby.com/107/232.html, https://de.wikipedia.org/w/index.php?curid=626959
Bild Gyroskop: https://commons.wikimedia.org/w/index.php?curid=142136; Kiko2000~commonswiki (talk | contribs); Rotating gyroscope on the top a nail. Source: Photo taken by user Kiko2000 {{GFDL}} Category:Mechanics\